Mechanical System Control — H-Bridge & PID
Overview
Built and tuned a motor-control system to evaluate how accurately and quickly a DC motor tracks an arbitrary velocity profile, implementing an H-bridge driver and PID control on Arduino.
Key points
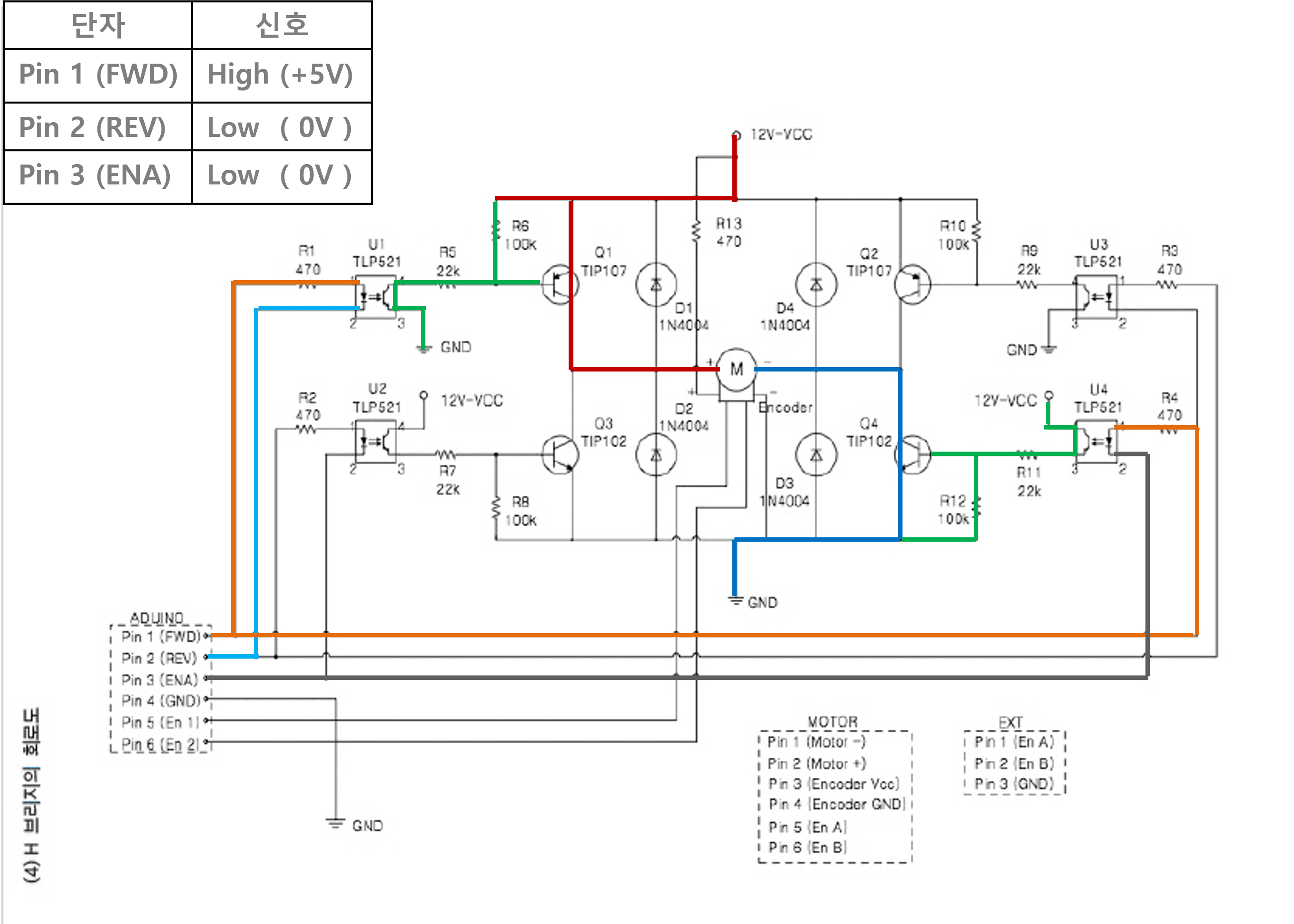
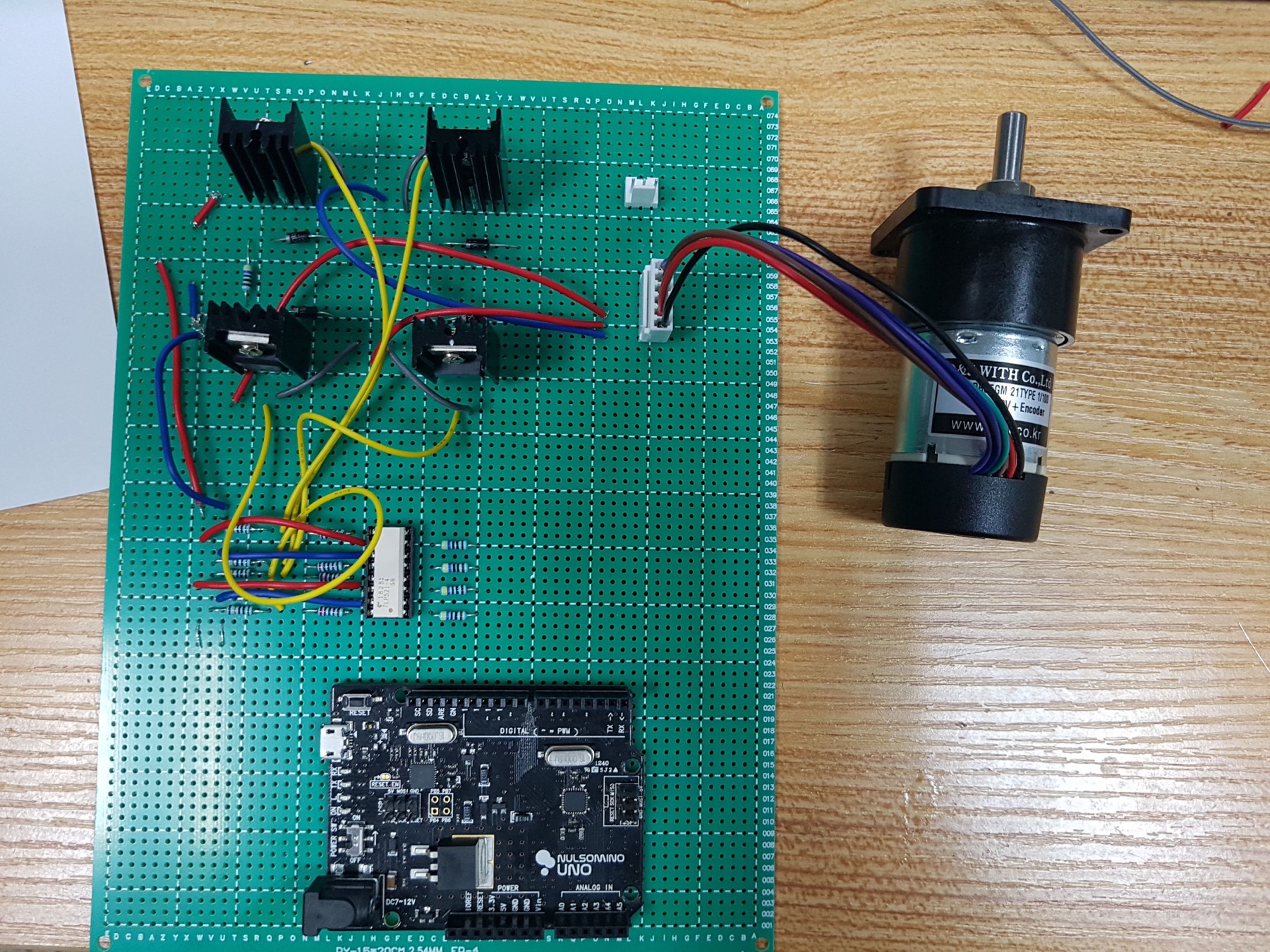
- Hand-built an H-bridge driver from transistors and wires soldered on a PCB, referencing the circuit diagram.
- Implemented PID control on Arduino for forward/backward motion and velocity tracking.
- Tested H-bridge switching (forward & backward) and PID motor response.
- Deepened understanding of circuit diagrams, component roles, and current/voltage considerations through hands-on build.
Figures